Кредит зображення: NASA / JPL
Камери, встановлені на щоглі на борту Mars Exploration Rovers, Spirit and Opportunity, забезпечать найкращий вид дотепер на поверхні Червоної планети. Їх камери можуть переміщуватися вгору і вниз на 90 градусів і повністю дивитися на 360 градусів. Перший ровер, Spirit, прибуде на Марс 3 січня, а Opportunity прибуде 25 січня.
Розроблена Університетом Корнелла панорамна камера, що називається Pancam, під назвою Pancam, на борту роверів Spirit і Opportunity забезпечить найясніші, найдокладніші марсіанські ландшафти, які коли-небудь бачили.
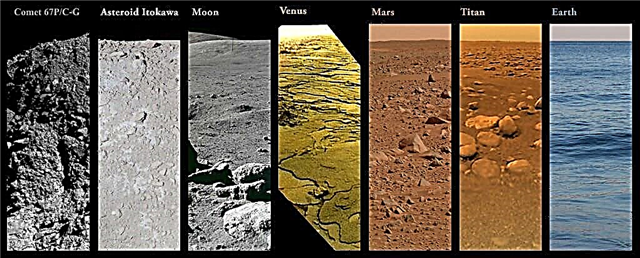
Роздільна здатність зображення - еквівалентна зору 20/20 для людини, що стоїть на поверхні Марсія - буде втричі вищою, ніж та, яка була зафіксована камерами під час місії Марс-Патфіндер у 1997 році або Землями Вікінгів у середині 1970-х.
На відстані 10 футів Pancam має роздільну здатність 1 міліметр на піксель. «Це такий Марс, як ви його ніколи раніше не бачили», - каже Стівен Сквайрес, професор астрономії Корнелл і головний дослідник набору наукових інструментів, що їх перевозять ровери.
Дух планується приземлитися на Марс 3 січня о 23:35. EST Можливість торкнеться 25 січня о 12:05 о EST.
Лабораторія реактивного руху (JPL) в Пасадені, підрозділ Каліфорнійського технологічного інституту, керує проектом Rover Exploration Rover для Управління космічної науки NASA, штат Вашингтон, Корнелл, Корнелл, штат Ітака, штат Нью-Йорк, керує науковими інструментами роверів.
Щогла Pancam може качати камеру на 360 градусів через горизонт і на 90 градусів вгору або вниз. Вчені будуть знати орієнтацію ровера щодня на поверхні Марсія, використовуючи дані, отримані під час пошуку камери та знаходження сонця на небі у відомий час доби. Вчені визначать місце розташування ровера на планеті, тріангуючи положення об'єктів, які можна побачити на далекому горизонті в різних напрямках.
Член наукової команди Ровера Джеймс Белл, доцент Корнелла з астрономії та провідний вчений Pancam, каже, що для ведення науки на Марсі важлива висока резолюція. «Ми хочемо побачити дрібні деталі. Можливо, в скелях є шаруватість, або скелі утворюються із відкладів замість вулканів. Нам потрібно бачити зерна гірських порід, незалежно від того, чи утворюються вони вітром або мають форму води », - каже він.
Крім того, Pancam важливий для визначення планів подорожей ровера. Каже Белл: "Нам потрібно побачити деталі можливих перешкод, які можуть бути далеко вдалині".
Оскільки кожна камера з двома об'єктивами CCD (пристрій, пов'язаний із зарядкою) робить знімки, електронні зображення будуть надсилатися на бортовий комп'ютер Rover на ряд етапів обробки зображень, включаючи стиснення, перед тим, як дані будуть надіслані на Землю.
Кожне зображення, зведене ні до чого іншого, як потік нулів і одиниць, буде частиною потоку інформації, що проміняється на Землю один раз або двічі на день, подорож, що займає 10 хвилин. Дані будуть отримані за допомогою глибокої космічної мережі NASA, доставлені контролерам місії в JPL та перетворені в необроблені зображення. Звідти зображення будуть відправлені в новий центр обробки зображень Марса в Корнельській будівлі наук про космос, де дослідники та студенти будуть наводити курсор на комп’ютери для створення науково корисних зображень.
Під час поверхневої активності роверами, з січня по травень 2004 року, буде проводитися щоденне масштабне планування науковою командою Марса на чолі зі Сківером. Дослідники Елаїна Маккартні та Джон Протон візьмуть участь у цих зустрічах і вирішать, як реалізувати плани щодо Pancam та п'яти інших інструментів кожного ровера.
Обробка знімків за 100 міль миль не буде легким подвигом. Викладачам, персоналу та студентам Корнелла знадобилося три роки, щоб точно відкалібрувати лінзи, фільтри та детектори Pancam та написати програмне забезпечення, яке розповість спеціальній камері, що робити.
Наприклад, дослідники Джонатан Джозеф та Яша Сол-Дікштейн написали та вдосконалили програмне забезпечення, яке створить зображення з великою чіткістю. Один із програмних програм Джозефа скріплює зображення разом у більші картинки, які називаються мозаїками, а інший розкриває деталі в межах одних зображень. Програмне забезпечення Соля-Дікштейна дозволить вченим створювати кольорові зображення та проводити спектральний аналіз, що важливо для розуміння геології та складу планети.
Велику роботу над камерою також здійснили випускники Корнелла Майлз Джонсон, Хізер Арнесон та Алекс Хейс. Хейс, який почав працювати над місією Марса як другокурсник Корнелла, створив макет панорамної камери, яка допомогла делікатному калібруванню кольорів та підрахунку фокусної відстані та поля зору фактичної камери Марса. Джонсон і Арнесон провели вісім місяців у JPL, керуючи Pancam в умовах Марса і збираючи дані калібрування для 16 фільтрів камери.
Для студентів та останніх випускників команди Pancam, дослідження було цінним досвідом та освітою. "Я стояв у чистому приміщенні в лабораторії реактивних установок і робив випробування на справжніх роверах", - каже Джонсон. "Це було дивне, але хвилююче почуття, що стояло поруч з таким дійсно складним обладнанням, яке незабаром з'явиться на Марсі".
Оригінальне джерело: Університет Корнелла