Об'єднана команда американських та канадських інженерів зробила перший перший крок, успішно застосувавши нове, своєрідне дослідження робототехніки, проведене на борту Міжнародної космічної станції (МКС) для можливого ремонту та заправки високоцінних космічних супутників на орбіті. , і яка має потенціал, щоб за один день принести економію мільярдів доларів для уряду та комерційного сектору.
Веселі дослідники обох країн кричали "Так !!!" - після успішного використання експерименту Robotic Refulling Mission (RRM) - зафіксований за межами ISS- як випробувального шару для демонстрації того, що робот з дистанційним керуванням у вакуумі простору може виконувати делікатні робочі завдання, що вимагають надзвичайно точного контролю руху. Революційний експеримент з робототехніки міг би продовжити термін експлуатації супутників, які вже знаходяться на орбіті Землі, над якими навіть не планували працювати.
"Після присвячення багатомісячного професійного та особистого часу RRM, це було великим емоційним поривом і заспокоєнням побачити перший відеопотік з інструменту RRM", - сказав Джастін Кассіді в ексклюзивному поглибленому інтерв'ю для Space Magazine. Кассіді - керівник апаратури RRM в Центрі космічних польотів NASA Goddard у Ґрінбелті, штат Меріленд.

А команда RRM вже планує здійснити ще більш амбітні наступні експерименти, починаючи вже з цього літа, включаючи довгоочікувану передачу рідин для імітації фактичної супутникової заправки, яка може перетворити додатки робототехніки в космос - детальніше див. Нижче!
Усі робототехнічні операції на станції дистанційно контролювались польовими диспетчерами. Метою дистанційного керування та робототехніки є звільнення людського екіпажу МКС, щоб вони могли працювати над іншими важливими видами діяльності та проводити наукові експерименти, що вимагають людської думки та втручання на місці.

Протягом трьох днів з 7 по 9 березня інженери проводили спільні операції між експериментом НАСА з роботизованої заправки (RRM) та роботодавчим "майстром" Канадського космічного агентства (CSA) - роботом Dextre. Dextre офіційно називається SPDM або Dexterous Manipulator спеціального призначення.
У перший день робототехнічні оператори на Землі віддалено маневрували 12-футовий (3,7 метрів) Dextre "підручний" експеримент RRM за допомогою побудованої в Канаді космічної станції робототехнічної руки (SSRMS).
«Рука» Dextre - технічно відома як «OTCM» - потім схопила та оглянула три різні спеціалізовані супутникові інструменти роботи, розміщені всередині блоку RRM. Комплексна механічна та електрична оцінка інструменту захисного ковпачка, інструмента для маніпуляції з дроту та ковдри та багатофункціонального інструменту показала, що всі три інструменти функціонують бездоганно.

"Наші команди механічно зафіксували" руку "канадського робота" Dextre "на інструменті захисних ковпачків RRM (SCT). RRM SCT є першим на орбіті блоком, який застосував відеоздатність руки Dextre OTCM », - пояснив Кассіді.
"На початку операцій з інструментом диспетчери місій механічно рухали електричну пупочку OTCM вперед, щоб поєднати її з інтегральною коробкою електроніки SCT. Коли живлення було застосовано до цього інтерфейсу, наша команда змогла побачити, що на телевізорах з великим екраном Годдарда - "перше світло" відео SCT показало знімок інструменту у відсіку для зберігання RRM (див. Фото).

"Наша команда вибухнула криком" Так! " щоб подякувати цьому успішному оформленню електричної функціональної системи. "
Далі Dextre виконував різні завдання, спрямовані на тестування того, наскільки вдало можуть бути маніпулюватися різноманітними репрезентативними газовими арматурами, клапанами, дротами та ущільнювачами, розташованими на зовнішній стороні модуля RRM. Він випустив замки безпеки та ретельно розрізав два надзвичайно тонкі супутникові дротові замки - виготовлені зі сталі - і розміром діаметром всього 20 тис. Дюймів (0,5 міліметра).
«Подія розрізання дроту тривала всього кілька хвилин. Але обидва завдання з різання дроту потребували приблизно 6 годин скоординованих, безпечних роботів. Провід замка був прокладений, скручений і прив'язаний до землі на межі шапки навколишнього середовища і Т-клапана перед польотом ", - сказала Кассіді.
Ця вправа RRM являє собою перший раз, коли робот Dextre був використаний для проекту технологічних досліджень і розробок на МКС, що значно розширило його можливості поза межами робототехнічного обслуговування масивного орбітального застави.
Підпис до відео: Роботна місія Dextre для заправки: День 2. Другий день найвимогливішої місії Dextre завершився успішно 8 березня 2012 року, коли роботодавець виконав свої три завдання. Кредит: NASA / CSA

Загалом три дні операцій зайняли близько 43 годин і тривали дещо швидше, ніж очікувалося, оскільки вони були настільки ж близькими до номінальних, як і можна було очікувати.
"Перші та другі дні тривали близько 18 годин", - заявив космічному журналу Чарльз Бекон, інженер системних операцій RRM в NASA Goddard. «Третій день пройшов приблизно 7 годин, оскільки ми закінчили всі завдання рано. Усі три дні проходили 18 годин, команда працювала в дві зміни. Тож час був таким, як очікувалося, і насправді трохи кращим, оскільки ми закінчили рано в останній день ».

"Протягом останніх кількох місяців наша команда створює поле для демонстрацій RRM на орбіті", - сказала мені Кассіді. "Як і театральна постановка, у нас є багато інженерів за лаштунками, які надавали підтримку розвитку та продовжують бути частиною операцій на орбіті RRM".
"На кожному етапі RRM - від підготовки, доставки, монтажу та зараз операцій - я здивований величезними зусиллями, що багато різних команд внесли свій внесок у здійснення RRM. Управління можливостями супутникового обслуговування в Центрі космічних польотів НАСА в Годдарді об'єдналося з Космічним центром Джонсона, Космічним центром Кеннеді (KSC), Центром космічних польотів Маршалла і Центром управління Канадського космічного агентства в Сент-Губерт, Квебек, щоб зробити RRM реальністю ".
"Успіх операцій RRM на сьогоднішній день на Міжнародній космічній станції (МКС) з використанням Dextre є свідченням досконалості багатьох організацій та партнерів НАСА", - пояснила Кассіді.
Триденне завдання з видалення газової арматури було початковим моделюванням для практикуючих технологій, необхідних для роботизованого виправлення несправних супутників та заправки в іншому випадку номінально працюючих супутників, щоб, мабуть, продовжити термін їх експлуатації на кілька років.
Наземні фахівці використовують арматуру та клапани для завантаження всіх необхідних рідин, газів і палив у резервуари для зберігання супутників до запуску, які потім закриваються, закриваються і зазвичай ніколи не звертаються до них знову.
"Вплив космічної станції як корисного випробувального шару не можна переоцінити", - говорить Френк Чеполліна, асоційований директор Управління можливостями супутникового обслуговування (SSCO) в НАСА в Центрі космічних польотів "Годдард" в Грінбелті, штат Массачусетс.
«Свіжі технології супутникового обслуговування будуть демонструватися в реальному космічному середовищі протягом місяців, а не через роки. Це величезне. Це реальний прогрес у просуванні космічних технологій ».
Ще чотири майбутні експерименти RRM, орієнтовно встановлені на цей рік, продемонструють здатність робота з дистанційним керуванням знімати бар'єри та заправляти порожні супутникові резервуари з газом у космосі, тим самим економлячи дороге обладнання від передчасного приєднання до орбітальної смуги.
Терміни майбутніх операцій RRM можуть бути складними і залежать від наявності Dextre та SSRMS-групи, які також сильно зарезервовані для багатьох інших поточних операцій МКС, таких як прогулянки на космосі, заходи з технічного обслуговування та наукові експерименти, а також причалювання та / або вивантаження постійної роботи. потік критичних суден для постачання вантажів, таких як «Прогрес», «Квадроцикл», «HTV», «Дракон» та «Сигнус».
Гнучкість є ключовою для всіх операцій МКС. І хоча екіпаж станції не залучений до RRM, їх діяльність може бути.
"Хоча сам екіпаж не покладається на Dextre для своїх операцій, Dextre ops може опосередковано впливати на те, що екіпаж може чи не може робити", - сказав мені Бекон. "Наприклад, під час наших операцій з RRM екіпаж не може виконувати певні фізичні вправи через те, як цей рух може вплинути на рух Dextre".
Ось перелік майбутніх операцій RRM - очікувані обмеження розкладу ISS:
* Заправка (літо 2012 р.) - Після того, як Dextre відкриє паливний клапан, подібний до того, який зазвичай застосовують сьогодні на супутниках, він передаватиме в нього рідкий етанол через складний робочий робочий шланг.
* Маніпуляція з тепловою ковдрою (TBD 2012) - Dextre буде практикувати відрізання теплової плівки і складання назад теплової ковдри, щоб розкрити вміст під нею.
* Зняття гвинта (кріплення) (TBD 2012) - Dextre буде роботовідкручувати супутникові болти (кріплення).
* Видалення електричної кришки (TBD 2012) - Dextre зніме ковпачки, які, як правило, охоплюють електричну розетку супутника.
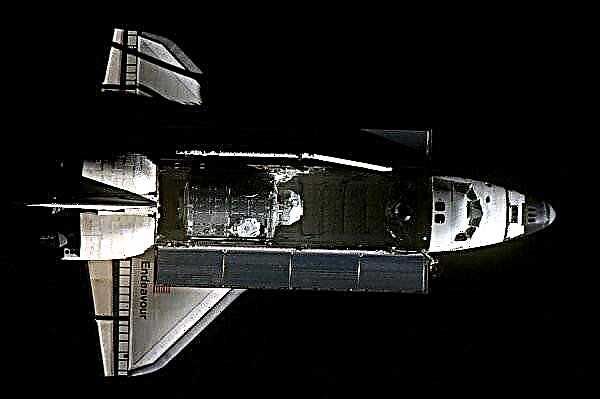
РРМ було винесено на орбіту всередині вантажної бухти Space Shuttle Atlantis протягом липня 2011 року під час фінальної човникової місії (STS-135) трирічної програми човника НАСА три десятиліття, а потім було встановлене на зовнішній робочій платформі на опорній фермі МКС космічними космонавтами. Проект є спільним зусиллям NASA та CSA.
«У цьому полягає успіх. За допомогою RRM ми по-справжньому прокладаємо шлях для майбутніх роботизованих розвідок та обслуговування супутників », - підсумувала Кассіді.

…….
24 березня (сб): безкоштовна лекція Кена Кремера в Астрономічній асоціації штату Нью-Джерсі, Державний парк Вурхіс, штат Нью-Джерсі, о 2030. Тема: Атлантида, програма "Трансфер в кінці Америки", RRM, Orion, SpaceX, CST-100 та майбутнє космічного польоту НАСА людьми та роботами