Оскільки на 1-тонному марсоході NASA Mars Curiosity виїжджає в епічний похід до древніх осадових шарів біля підніжжя таємничої гори Шарп, Space Magazine провела ексклюзивне інтерв'ю з керівником проекту Curiosity Джимом Еріксоном з лабораторії реактивного руху НАСА (JPL), щоб отримати найновіший совок, так би мовити, на пригоди потойбічних роботів.
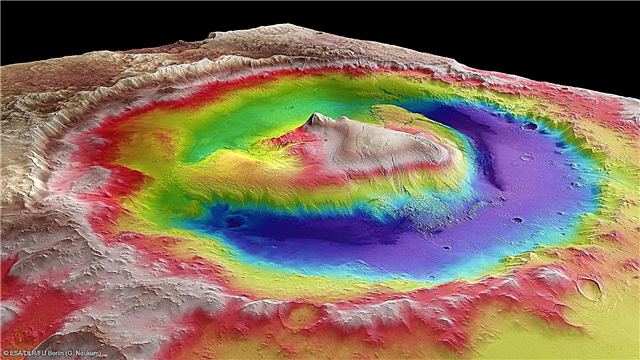
Зараз наукові та інженерні колективи наполегливо працюють над тим, щоб пришвидшити дорогу роверів приблизно за рік у дорогу до Марсіанської гори на 3,4 км (5,5 км), яка є головним пунктом призначення місії та містить сховища корисних копалин, які є ключовими для іскроутворення та підтримки життя.
"Ми відійшли Гленелг і Шалера, відступивши і вирушили на гору Шарп", - сказав мені Еріксон.
В цілому шість колісних роверів просто перевищили позначку на 1 кілометр (0,62 милі) у плаванні по Червоній планеті.
Гора Шарп лежить приблизно в 5 милях (8 кілометрів) далеко - як летить марсіанська ворона.

Цікавості доведеться пройти через потенційно підступні дюнні поля довгою дорогою до шаруватої гори.
"Все йде дуже добре, і у нас є кілька приводів під поясом", - сказав Еріксон.
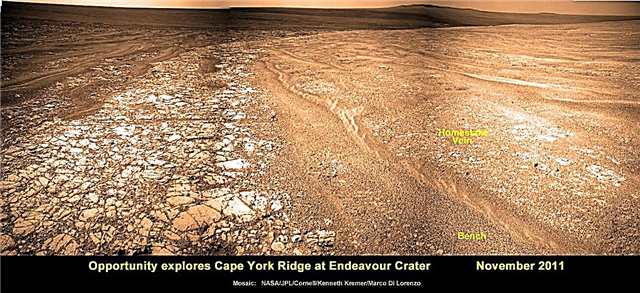
Цікавість щойно завершила більш ніж піврічну гідну науку в Гленелгу та Єллонікфійському затоці, де вона виявила житлове середовище на Червоній планеті з хімічними інгредієнтами, здатними підтримувати марсіанські мікроби - тим самим уже досягнувши первинної мети флагманської місії НАСА на Марс.
Керівники цікавості модернізують мозок роверів новим водійським програмним забезпеченням, роблячи її розумнішою, продуктивнішою та здібнішою, ніж будь-коли раніше, а також набагато більш незалежною від її захоплюючого приземлення всередині Гале Кратера майже рік тому 6 серпня 2012 року.
«Ми продовжуємо їздити регулярно. Наступний диск запланований на завтра і буде виконаний наступного дня ».
Станом на сьогодні (Sol 336, 17 липня), Curiosity проїхав шість разів з моменту виходу з Гленелг 4 липня (Sol 324), загальною кількістю понад 180 метрів.

Вчені спеціально націлилися на цікавість до Кратера Гейла та гори Шарп, оскільки він завантажений родовищами глинистих мінералів, що утворюються в нейтральній воді, і які, можливо, могли б підтримати походження та еволюцію простих марсіанських форм життя, минулих чи сучасних.
Еріксон працював на ключових посадах у багатьох планетарних наукових місіях НАСА, що датуються Вікінгом. Сюди входить місія "Галілео" на Юпітері, обидва ровери MER Spirit & Opportunity, а також стихія з Марсовим оркестром розвідки (MRO).
Ось частина 1 моєї широкої розмови з Джимом Еріксоном, керівником проекту JPL Curiosity. Частина 2 буде наступною.
Я попросив Еріксона описати нове програмне забезпечення для водіння, яке називається автономною навігацією, або автонав, і як це допоможе прискорити цікавість на її шляху. Дотепер більшу частину планування для неї робили інженери на Землі.
Джим Еріксон: Ми розмістили нове програмне забезпечення - автонів, або автономну навігацію - на транспортному засобі відразу після періоду сполучення ще в березні 2013 року. Це підвищить нашу здатність керувати автомобілем.
Причина, за якою ми це помістили, - це те, що ми знали, що це буде корисно, коли ми розпочали довгий шлях до гори Шарп. І ми свербимо це перевірити. Протягом наступних тижнів ми будемо робити різні тести з автонами.
Кен Кремер: Як автонів допоможе цікавості?
Джим Еріксон: Ровер зможе зрозуміти, наскільки він їде, незалежно від його ковзання чи ні, та підвищити безпеку.
І тоді буде діяти наступний крок, щоб дозволити роверу самостійно їхати.
Кен: Як часто їздитиме цікавість?
Джим Еріксон: Десь, як і кожен другий день. Ми плануємо привід, подивимось, як він проходить і чи добре він пройшов, а потім переходимо далі до наступного приводу. Ми реалізуємо це так, як є, поки ми робимо каси аутонів.
Можливо, для завершення тестування нам, можливо, доведеться припинити рух для частини каси для автонагляду.
В основному ми обмежені, головним чином, кількістю днів, які ми успішно завершили на дорозі попереднього дня. І чи буде у нас інформація повертається [на Землю], щоб ми могли спланувати поїздку на наступний день
За деяких обставин Марсовий час може обертатися, щоб ми не отримали дані назад у часі, тому ми цього дня не будемо їздити.
Кен: Ви можете коли-небудь їздити два дні поспіль?
Джим Еріксон: Так, ми можемо, якщо терміни вірні. Якщо ми отримаємо результати руху за день (n) до того, як нам доведеться планувати рух на наступний день (n + 1) - майже так, як якщо б ти не був на Марсі. Тоді це буде добре.
Крім того, коли ми отримаємо можливість autonav, ми можемо планувати два дні поспіль. Один день керованої їзди та другий день може бути "Гаразд, це ваша ціль, звідки б ви не опинилися, спробуйте перейти до цього місця".
Це збільшить продуктивність!
Кен: Коли буде запущено автонів?
Джим Еріксон: Щось на кшталт двох-трьох тижнів. Нам потрібно ретельно переглянути всі тести і спершу їх підтвердити, щоб нам усім було комфортно.
Кен: Який зараз марсіанський рельєф на підлозі кратера Гале, як зараз, і протягом наступних кількох миль?
Джим Еріксон: Це суміш піску та різних районів, що знаходяться під прапорами. Потрапляючи до нас, нам потрібно буде мати можливість комфортно їздити на обох. Не так вже й багато великих скель, які б зараз були проблемою. Ми обходимо деяку площу полиць.
Наразі область, у якій ми знаходимось, насправді гарна штука, яка дає нам практику виявляти перешкоди та подолати їх. Це допоможе нам згодом, коли ми побачимо перешкоди та хочемо їхати швидше.
Кен: Який загальний план зараз, фокус на керуванні автомобілем або зупинці та розслідуванні?
Джим Еріксон: - Це не намір зупинятися. Це буде хороша пара тижнів за кермом.
У частині 2 моєї розмови з Джимом Еріксоном ми поговоримо докладніше про пересування ровера через чужу територію, що є одночасно науковою золотою шахтою та потенційною пасткою смерті, а також заходи щодо буріння та відбору проб, спостережень ISM від Comet та майбутніх цілей науки.
Попередній досвід роботи з марсоходами на Марсі буде дуже корисним у вивченні взаємодії ровера з дюнними полями. Autonav вперше був використаний на верстатах MER.
Водії роверів та наукова команда накопичили багато досвіду та вмінь під час руху як Spirit & Opportunity через численні гігантські поля дюн, що відрізняються складом та складністю.
Слідкуйте за новими на Марсі.