Далі йде заключний уривок з моєї нової книги "Неймовірні історії з космосу: за кадром. Погляд на місії, що змінюють наш погляд на Космос". Книга - це внутрішній вигляд декількох сучасних робототехнічних місій NASA, і цей уривок є частиною 3 із 3, розміщеними тут, у журналі «Космічний журнал», глави 2, «Руйнуючий Марс з цікавістю». Частину 1 ви можете прочитати тут, а частину 2 - тут. Книга доступна у друкованих видах чи електронних книгах (Kindle або Nook) Amazon та Barnes & Noble.
Як їхати на марсоході
Звідки цікавість знає, де і як проїхати через поверхню Марса? Ви можете передбачити інженерів JPL, використовуючи джойстики, подібні до тих, що використовуються для іграшок з дистанційним керуванням або відеоігор. Але на відміну від RC-водіння або ігор, у драйверів марсохода Rover немає негайних візуальних входів або відеоекрану, щоб побачити, куди їде ровер. І так само, як на посадці, завжди є затримка в часі, коли команда надсилається на ровер і коли вона приймається на Марс.
"Це не їзда в інтерактивному сенсі в режимі реального часу через відставання часу", - пояснив Джон Майкл Моруакян, який очолює команду водіїв роверів.
Фактична назва роботи Morookian та його команди - "Rover Planners", де точно описано, чим вони займаються. Замість того, щоб "водити" ровери як такі; вони заздалегідь планують маршрут, програмують спеціалізоване програмне забезпечення та завантажують інструкції до Curiosity.
"Ми використовуємо зображення, зроблені ровером його околиць", - сказав Моруакян. "У нас є набір стерео зображень із чотирьох чорно-білих навігаційних камер, а також зображення з Hazcams (камери уникнення небезпеки), підтримувані кольоровими зображеннями високої роздільної здатності з MastCam, які дають нам детальну інформацію про природу місцевості попереду та підказки про види гірських порід та корисних копалин на ділянці. Це допомагає визначити структури, які виглядають цікавими вченим ».
Використовуючи всі наявні дані, вони можуть створити тривимірну візуалізацію місцевості за допомогою спеціалізованого програмного забезпечення під назвою Програма секвенування та візуалізації Rover (RSVP).
"Це в основному тренажер Марса, і ми помістили змодельовану цікавість у панораму сцени, щоб візуалізувати, як ровер міг проходити на своєму шляху", - пояснив Моруакян. "Ми також можемо надіти стерео-окуляри, які дозволяють нашим очам бачити сцену в трьох вимірах, як ніби ми там з ровером.
У віртуальній реальності водії роверів можуть маніпулювати сценою та ровером, щоб перевірити всі можливості, які маршрути найкращі та яких ділянок слід уникати. Там вони можуть зробити всі помилки (застрягти в дюні, нахилити ровер, врізатись у велику скелю, проїхати провал) і вдосконалити послідовність руху, поки справжній ровер залишається в безпеці на Марсі.
«Вчені також переглядають зображення на предмет цікавих особливостей та консультуються з Rover Planners, щоб допомогти визначити шлях. Тоді ми складаємо детальні команди, необхідні, щоб домогтися цікавості з точки А до точки В по цьому шляху », - сказав Моруакян. "" Ми також можемо включити команди, необхідні для того, щоб дати маршрутизатору напрямок для встановлення контакту з сайтом, використовуючи його роботизовану руку. "

Отже, щовечора роверу призначається вимикатись на вісім годин, щоб зарядити свої батареї ядерним генератором. Але спочатку Curiosity надсилає дані на Землю, включаючи фотографії місцевості та будь-яку наукову інформацію. На Землі планувальники Rover беруть ці дані, виконують свої планувальні роботи, завершують програмування програмного забезпечення та передають інформацію назад на Марс. Потім цікавість прокидається, завантажує інструкції та налаштовує на роботу. І цикл повторюється.
Цікавість також має функцію AutoNav, яка дозволяє роверу об'їжджати ділянки, які команда ще не бачила на зображеннях. Таким чином, він міг би перейти через пагорб та вниз по іншій стороні до незвіданої території, відчуваючи потенційні небезпеки AutoNav.
"Ми не використовуємо його занадто часто, оскільки він обчислюється дорого, тобто знадобиться набагато більше часу, щоб ровер працював у такому режимі", - сказав Моруакян. "Ми часто виявляємо, що найкраще торгувати наступним днем, дивитись на зображення та їхати, наскільки ми можемо бачити".

Коли Morookian показав мені різні кімнати, якими користувалися команди з планування роверів у JPL, він пояснив, як їм потрібно працювати протягом кількох різних часових масштабів.
"Ми не тільки плануємо щоденне планування маршруту", - сказав він, - але також робимо стратегічне планування на дальньому діапазоні, використовуючи орбітальні знімки з камери HiRISE на Марсі розвідувальної орбіти і вибираємо шляхи на основі особливостей, видно з орбіти. Наша команда працює стратегічно, шукаючи багато місяців, щоб визначити найкращі шляхи ».
Ще один процес під назвою Supra-Tactical виглядає лише на наступному тижні. Це передбачає планування науковими розробниками та вдосконалення видів діяльності, які ровер здійснюватиме в короткий термін. Крім того, оскільки ніхто з команди не живе на Марсовому часі більше, по п’ятницях планувальники Rover розробляють плани протягом декількох днів.
"Оскільки ми не працюємо у вихідні дні, плани на п’ятницю містять безліч заходів", - сказав Моруакян. "Дві паралельні команди вирішують, в які дні їде ровер і в які дні він буде виконувати інші види діяльності, такі як робота з роботою-рукою або іншими інструментами".
Дані, які надходять з ровера протягом вихідних, відстежуються, проте, якщо виникають проблеми, команда викликається для більш детальної оцінки. Моруакян зазначив, що їм доведеться кілька разів залучати команду екстрених вихідних, але поки що серйозних проблем не було. "Однак це все одно тримає нас на ногах", - сказав він.
Ровер містить ряд реактивних перевірок безпеки щодо сумарного нахилу палуби ровера та зчленування системи підвіски коліс, тож якщо ровер перейде над занадто великим предметом, він автоматично зупиниться.
Цікавість була побудована не для швидкості. Він був розроблений за добу до 200 метрів до 660 футів, але він рідко їздить так далеко в зоні. На початку 2016 року ровер проїхав загалом приблизно 7,5 миль (12 км) по поверхні Марса.

Існує кілька способів визначити, як далеко проїхав цікавість, але найточніше вимірювання називається "Візуальна одометрія". Цікавість має спеціалізовані отвори на колесах у формі букв Морзе, що пише "JPL" - кивком до дому науково-технічних колективів ровера - по всій марсіанській землі.
"Візуальна одометрія працює, порівнюючи найсвіжішу пару стереозображень, зібраних приблизно на кожен метр за приводом", - сказав Моруакян. "Індивідуальні особливості сцени узгоджуються та відслідковуються, щоб визначити, як камера (і, отже, ровер) переклала та обертається в 3-х мірному просторі між двома зображеннями, і це в дуже реальному сенсі повідомляє нам, наскільки далеко пішов Curiosity . "
Ретельний огляд роверних колій може виявити тип тяги, яку мають колеса, і якщо вони ковзають, наприклад, через високі схили або піщану землю.
На жаль, зараз у Curiosity з'явилися нові отвори на колесах, яких, як передбачається, там немає.
Проблеми Rover
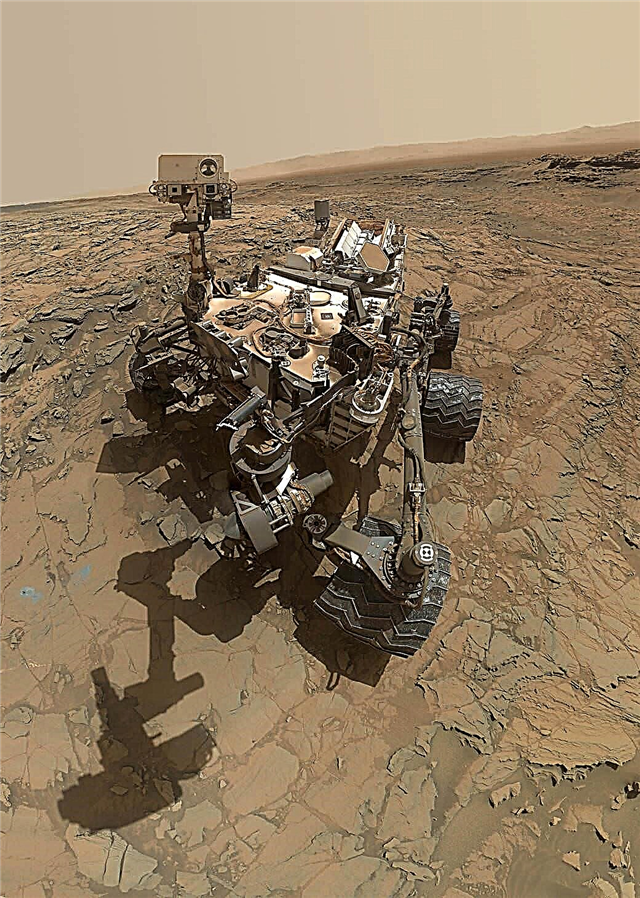
Morookian та науковець проекту Ешвін Васавада висловили полегшення та задоволення, що загалом - це далеко до місії - цікавість є досить здоровим ровером. Весь корисний вантаж науки в даний час працює майже на повну потужність. Але інженерна команда стежить за кількома питаннями.
"Навколо соля 400 ми зрозуміли, що колеса зношуються швидше, ніж ми очікували", - сказав Васавада.

І знос не складався з просто маленьких дірок; команда почала бачити проколи та неприємні сльози. Інженери зрозуміли, що отвори створюються жорсткими, зубчастими скелями, на яких ровер проїжджав за цей час.
"Ми не сподівалися на повну" гострих "скель, які завдали шкоди", - сказав Васавада. "Ми також провели тестування і побачили, як одне колесо може штовхати інше колесо в скелю, що робить шкоду погіршенням. Зараз ми їздимо обережніше і не їздимо так довго, як у минулому. Ми змогли нівелювати шкоду за більш прийнятну ціну. "
На початку місії комп'ютер Curiosity кілька разів перейшов у «безпечний режим», оскільки програмне забезпечення Curiosity визнало проблему, і відповідь полягала в тому, щоб заборонити подальшу активність та телефонувати додому.
Спеціалізоване програмне забезпечення захисту від несправностей працює через модулі та інструменти, і коли виникає проблема, ровер зупиняється та надсилає на Землю дані, що називаються «записами подій». Записи включають різні категорії терміновості, і на початку 2015 року ровер надіслав повідомлення, яке по суті сказало: "Це дуже, дуже погано". Дриль на руці ровера відчував коливання електричного струму - як коротке замикання.
"Програмне забезпечення цікавості має можливість виявляти шорти, як, наприклад, переривник замикання на землю у вашій ванній кімнаті", - пояснив Моруокян, "за винятком цього, ви говорите, що" це дуже, дуже погано ", а не просто давати вам жовте світло".
Оскільки команда не може поїхати на Марс і виправити неполадки, все виправлено або шляхом надсилання оновлень програмного забезпечення на ровер, або шляхом зміни оперативних процедур.

"Ми зараз акуратніше ставимося до того, як ми використовуємо свердло", - сказав Васавада, - і не буріть з усією силою на початку, а повільно наростайте. Це схоже на те, як ми зараз їздимо більш акуратно, але це все-таки виконує роботу. На сьогодні це ще не мало величезного впливу ".
Більш легкий дотик до свердла також був необхідний для більш м'яких грязей та пісковиків, з якими стикався ровер. Морукіян заявив, що існує стурбованість, що шаруваті скелі можуть не затриматись під штурмом стандартного протоколу буріння, і тому вони налаштували техніку на використання найнижчих "параметрів", які все ще дозволяють бурі досягти достатнього прогресу в скелі.
Але можливості використовувати сівалку збільшуються, коли цікавість починає свою гору в гору. Ровер їде через те, що Васавада називає «цільовою багатою, дуже цікавою областю», оскільки науковий колектив працює над тим, щоб поєднати геологічний контекст усього, що вони бачать на зображеннях.
Пошук балансу на Марсі
Незважаючи на те, що відхилення в бухту Йеллоунфійф дозволило команді зробити кілька значних відкриттів, вони відчули тиск, щоб дістатися до гори. Різкий, тому "проїхав як пекло за рік", - сказав Васавада.
Зараз на горі все ще існує тиск, щоб максимально використати місію, маючи на меті зробити її через щонайменше чотири різних скельних одиниць - або шарів - на горі. Різкий. Кожен шар може бути подібним до глави в історії історії Марса.

«Вивчення гори. Різке захоплююче, - сказав Васавада, - і ми намагаємось підтримувати поєднання між справді великими відкриттями, які - як ти ненавидиш сказати - сповільнюють нас і стаєш вище на гору. Придивившись уважно до скелі перед собою, ви означає, що ви ніколи не зможете перейти і подивитися на цю іншу цікаву скелю там. "
І Васавада, і Моруокян сказали, що щодня зберігати цей баланс - знайти завдання, яке називається "коліно в кривій" або "солодке місце" ідеальної оптимізації між їздою та зупинкою для науки.
Тоді існує рівновага між перестанням робити повне спостереження з усіма інструментами і робити "льотну науку", де проводяться менш інтенсивні спостереження.
"Ми беремо спостереження, що ми можемо, і формуємо всі гіпотези, які ми можемо в режимі реального часу", - сказав Васавада. "Навіть якщо у нас залишилося 100 відкритих питань, ми знаємо, що зможемо відповісти на ці питання пізніше, доки ми знаємо, що ми взяли достатньо даних".
Основна ціль цікавості - це не вершина, а натомість область близько 1330 футів (400 метрів) вгору, де геологи очікують знайти межу між скелями, які побачили багато води за свою історію, та тими, які цього не зробили. Ця межа дозволить зрозуміти перехід Марса від мокрої планети до сухої, заповнивши ключовий пробіл у розумінні історії планети.

Ніхто насправді не знає, як довго триватиме цікавість, чи він здивує всіх, як і його попередники «Дух та можливість». Зробивши його минулою «головною місією» одного року на Марсі (два земні роки), а тепер у розширеній місії, однією з великих змінних є джерело живлення RTG. Хоча наявна потужність почне неухильно зменшуватися, і Васавада, і Маруакян не очікують, що вони будуть випущені щонайменше ще чотири земні роки, і при правильному "вихованні" потужність може тривати десяток і більше років.
Але вони також знають, що немає способу передбачити, як довго триватиме цікавість чи яка несподівана подія може закінчити місію.
Звір
Цікавість має таку особистість, як попередні марсоходи?
"Насправді ні, ми, схоже, не антропоморфізуємо цей марсохід, як це робили люди з Духом і можливостями", - сказав Васавада. «Ми з цим емоційно не пов’язані. Соціологи насправді вивчали це ». Він похитав головою з веселою посмішкою.
Васавада зазначив, що це може бути пов'язане з розміром цікавості.
"Я думаю про це як про гігантського звіра", - сказав він прямолінійно. "Але зовсім не середньо".

Вазавада зазначив, що це охарактеризувало цю місію - це її складність у кожному вимірі: людська складова, щоб 500 людей працювали і співпрацювали разом, оптимізуючи таланти кожного; збереження ровера безпечним і здоровим; і тримати щодня десять інструментів, які іноді виконують абсолютно незв'язані наукові завдання.
"Кожен день - це наші маленькі" сім хвилин терору ", де стільки речей має виходити щодня", - сказав Васавада. «Є мільйон потенційних проблем і взаємодій, і вам потрібно постійно думати про всі способи, як все може піти не так, адже є мільйон способів, які можна зіпсувати. Це складний танець, але, на щастя, у нас чудова команда. "
Потім він посміхнувся: "Ця місія захоплююча, навіть якщо це звір".
"Неймовірні історії з космосу: кулуарні погляди на місії, що змінюють наш погляд на космос" публікується дочірньою компанією "Макміллан".