Нещодавно НАСА Лабораторія реактивного руху оголосила, що розробляє невеликий безпілотний вертоліт, щоб розвідати шлях майбутнім марсоходам. Чому марсові ровери потрібні такі роботизовані посібники? Відповідь полягає в тому, що їхати на Марсі дійсно важко.
Тут, на Землі, роботи, що досліджують вулканічні ободи або допомагають рятувальникам, можуть керувати дистанційним управлінням, використовуючи джойстик. Це пов’язано з тим, що радіосигнали майже миттєво надходять до робота з його центру управління. Їхати на Місяці не набагато складніше. Радіосигнали, що подорожують зі швидкістю світла, займають близько двох з половиною секунд, щоб здійснити кругову поїздку до Місяця та назад. Ця затримка недостатня для того, щоб серйозно заважати керуванню дистанційним керуванням. У 1970-х роках радянські диспетчери проїхали так званими луноходами на Луноході, успішно досліджуючи понад 40 км місячної місцевості.
Їхати на Марсі набагато важче, бо так далеко. Залежно від її положення щодо Землі, сигнали можуть зайняти від 8 до 42 хвилин для поїздки в обидва кінці. Попередньо запрограмовані інструкції повинні бути відправлені на ровер, який він потім виконує самостійно. Кожен марсіанський привід займає години ретельного планування. Інженери ретельно перевіряють стереофотографії, зроблені навігаційними камерами ровера. Зображення космічних кораблів, що обходять навколо Марса, іноді дають додаткову інформацію.
Ровер може бути запрограмований або просто виконати список команд водіння, що надсилаються з Землі, або він може використовувати зображення, зроблені його навігаційними камерами та оброблені його бортовими комп'ютерами для вимірювання швидкості та виявлення перешкод чи небезпек самостійно. Він навіть може побудувати свій власний безпечний шлях до визначеної мети. Диски на основі інструкцій із землі найшвидші.
Дух і можливості Марса дослідницьких роверів могли таким чином проїхати до 124 метрів за годину. Це відповідає приблизно довжині американського футбольного поля. Але цей режим був і найменш безпечним.
Коли ровер активно керується своїми камерами, прогрес стає безпечнішим, але набагато повільніше через всю необхідну обробку зображень. Він може просуватися лише за 10 метрів на годину, що становить приблизно відстань від лінії воріт до лінії 10 ярдів на полі американського футболу. Цей метод слід застосовувати, коли ровер не має чіткого виду маршруту, що попереду, що часто трапляється через нерівну та горбисту місцевість.
Станом на початок 2015 року найдальший Curiosity проїхав за один день - 144 метри. Найдовший щоденний пробіг нашої компанії - 224 метри, відстань - довжина двох полів американського футболу.
Якби наземні контролери могли отримати кращий огляд шляху вперед, вони могли б розробити інструкції, що дозволяють майбутньому роверу безпечно їхати набагато далі за день.
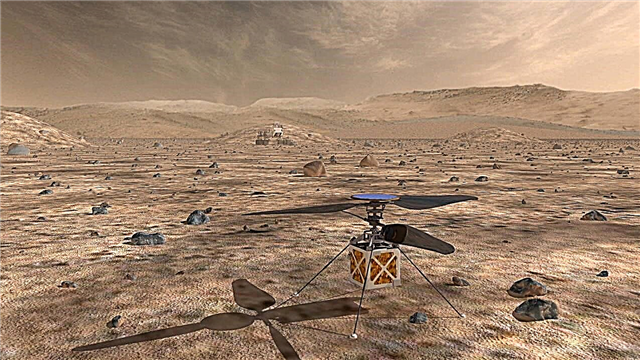
Тут іде ідея про безпілотний вертоліт. Вертоліт міг вилітати перед ровером щодня. Зображення, зроблені з повітряної точки зору, були б безцінними для наземних контролерів для визначення точок, що представляють науковий інтерес, та планування маршрутів руху, щоб дістатися туди.
Політ вертольота на Марс викликає особливі проблеми. Однією з переваг є те, що марсіанська гравітація лише на 38% сильніша, ніж у Землі, так що вертольоту не потрібно було б генерувати стільки, скільки одна і та ж маса на Землі. Лопатки вертольота гелікоптера генерують підйом, виштовхуючи повітря вниз. На Марсі це важче зробити, ніж на Землі, оскільки марсіанська атмосфера в сто разів тонша. Щоб витіснити достатню кількість повітря, лопаті гвинта потрібно було б обертати дуже швидко або бути дуже великими.
Вертоліт повинен бути здатний літати самостійно, користуючись попередніми інструкціями, підтримуючи стабільний політ за заздалегідь заданим маршрутом. Він повинен приземлятися і злітати неодноразово на скелястій марсіанській місцевості. Нарешті, він повинен пережити суворі умови Марса, де температура щовечора падає до 100 градусів Фаренгейта чи нижче.
Інженери JPL сконструювали вертоліт масою 1 кілограм; крихітна частка 900 кг маси ровера Curiosity. Її лопаті гвинта охоплюють 1,1 метра від кінця леза до кінця леза і здатні обертатися при 3400 обертаннях в хвилину. Тіло приблизно розміром з тканинної коробки.
Коптер працює на сонячній енергії, при цьому диск сонячних батарей щодня збирає достатню кількість енергії для польоту на дві-три хвилини та для обігріву транспортного засобу вночі. Він може пролетіти приблизно півкілометра в цей час, збираючи зображення для передачі наземному керуванню, коли йде. Інженери розраховують, що розвідка, яку збирає безпілотник, буде неоціненною для планування приводів ровера, утричі перевищивши відстань, яку можна пройти за день.
Посилання та додаткове читання:
Дякуємо Марку Меймону з лабораторії реактивного руху NASA за інформацію про щоденні дистанції проїзду цікавості та можливостей.
Дж. Дж. Biesiadecki, P. C. Leger, M.W. Maimone (2007), "компроміси між спрямованим та автономним керуванням на марсарах Марса", Міжнародний журнал досліджень робототехніки, 26 (1), 91-104
Е. Хоуелл, Можливість Марсохід «Марс» проїхав відстань 41 кілометр у напрямку «Марафонської долини», Космічний журнал, грудень 2014 року.
T. Reyes, Неймовірна мандрівка, марсохід Mars Curiosity досягає основи гори Шарп. Космічний журнал, вересень 2014 року.
Вертоліт може бути "розвідником" для марсоходів. Прес-реліз лабораторії реактивного руху НАСА. 22 січня 2015 року.
Божевільна інженерія: вертоліт Марс. Відео лабораторії реактивного руху НАСА.
Цікавість - наукова лабораторія Марса, НАСА.
Марс - майбутні плани на ровері. НАСА